Lecture Materials
Systems of ODEs#
First-order ODEs#
A system of \(N\) first-order ODEs reads
In vector notation:
All the methods we covered have exactly the same structure for systems of ODEs, applied to vectors:
Euler method
RK2
RK4
def ode_euler_multi(f, x0, t0, h, nsteps):
"""Multi-dimensional version of the Euler method.
"""
t = np.zeros(nsteps + 1)
x = np.zeros((len(t), len(x0)))
t[0] = t0
x[0,:] = x0
for i in range(0, nsteps):
t[i + 1] = t[i] + h
x[i + 1,:] = ode_euler_step(f, x[i], t[i], h)
return t,x
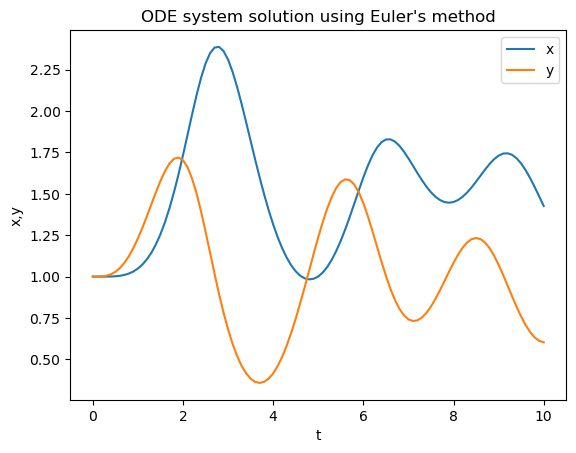
Example: System of equations
Let us solve it using Euler’s method:
def ff(xin, t):
x = xin[0]
y = xin[1]
return np.array([x*y-x,y-x*y+np.sin(t)**2])
a = 0.
b = 10.0
N = 100
h = (b-a)/N
tpoints = np.arange(a,b,h)
xpoints = []
ypoints = []
sol = ode_euler_multi(ff,[1.0,1.0], a, h, N)
tpoints = sol[0]
xpoints = sol[1][:,0]
ypoints = sol[1][:,1]
plt.title("ODE system solution using Euler's method")
plt.xlabel('t')
plt.ylabel('x,y')
plt.plot(tpoints,xpoints,label='x')
plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
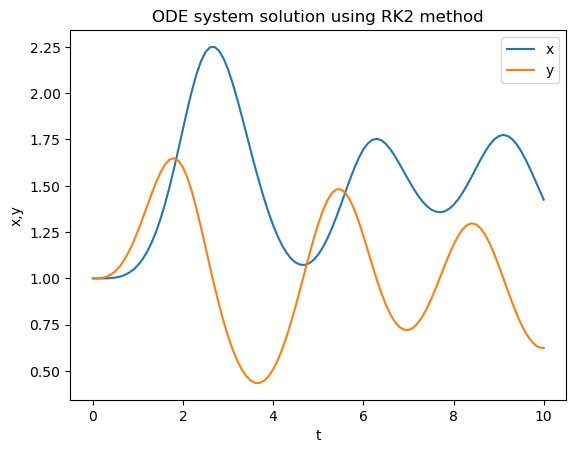
Now lets us apply RK2 method
def ode_rk2_multi(f, x0, t0, h, nsteps):
"""Multi-dimensional version of the RK2 method.
"""
t = np.zeros(nsteps + 1)
x = np.zeros((len(t), len(x0)))
t[0] = t0
x[0,:] = x0
for i in range(0, nsteps):
t[i + 1] = t[i] + h
x[i + 1] = ode_rk2_step(f, x[i], t[i], h)
return t,x
def ff(xin, t):
x = xin[0]
y = xin[1]
return np.array([x*y-x,y-x*y+np.sin(t)**2])
a = 0.
b = 10.0
N = 100
h = (b-a)/N
tpoints = np.arange(a,b,h)
xpoints = []
ypoints = []
sol = ode_rk2_multi(ff,[1.0,1.0], a, h, N)
tpoints = sol[0]
xpoints = sol[1][:,0]
ypoints = sol[1][:,1]
plt.title("ODE system solution using RK2 method")
plt.xlabel('t')
plt.ylabel('x,y')
plt.plot(tpoints,xpoints,label='x')
plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
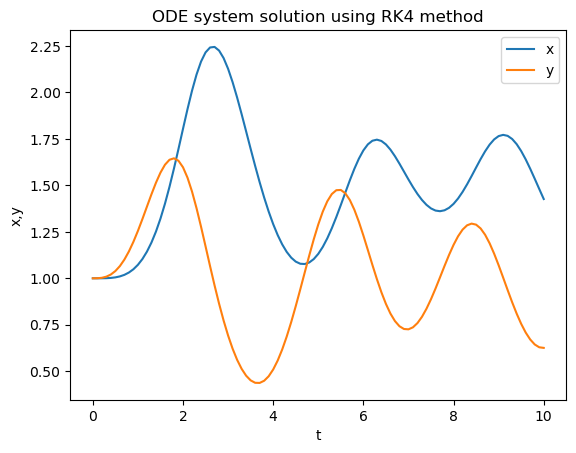
Finally, let us apply RK4 to the system of equations:
def ode_rk4_multi(f, x0, t0, h, nsteps):
"""Multi-dimensional version of the RK4 method.
"""
t = np.zeros(nsteps + 1)
x = np.zeros((len(t), len(x0)))
t[0] = t0
x[0] = x0
for i in range(0, nsteps):
t[i + 1] = t[i] + h
x[i + 1] = ode_rk4_step(f, x[i], t[i], h)
return t,x
def ff(xin, t):
x = xin[0]
y = xin[1]
return np.array([x*y-x,y-x*y+np.sin(t)**2])
a = 0.
b = 10.0
N = 100
h = (b-a)/N
tpoints = np.arange(a,b,h)
xpoints = []
ypoints = []
sol = ode_rk4_multi(ff,[1.0,1.0], a, h, N)
tpoints = sol[0]
xpoints = sol[1][:,0]
ypoints = sol[1][:,1]
plt.title("ODE system solution using RK4 method")
plt.xlabel('t')
plt.ylabel('x,y')
plt.plot(tpoints,xpoints,label='x')
plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
Second-order ODEs#
A system of \(N\) 2nd-order ODEs
can be written as a system of \(2N\) 1-st order ODEs by denoting \(d\mathbf{x}/dt = \mathbf{v}\):
and solved using standard methods.
This is particularly relevant for classical mechanics problems since Newton/Lagrange equations of motion correspond to a system of 2nd order ODEs.
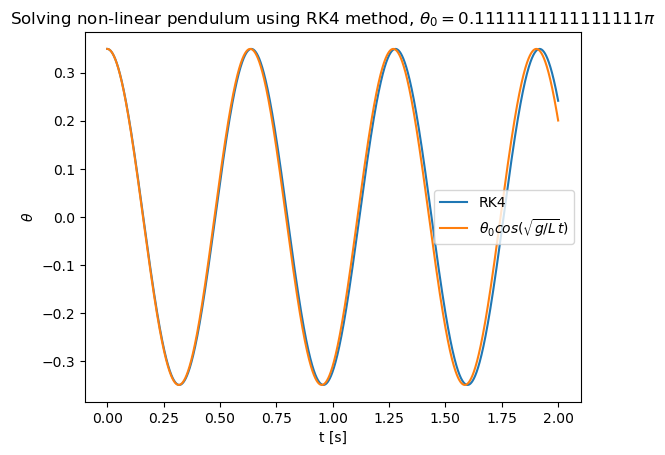
Example: Simple pendulum in non-linear regime#
The equation of motion for non-linear pendulum reads $\( m L \frac{d^2 \theta}{dt^2} = - m g L \sin \theta. \)$
Denoting \(d\theta / d t = \omega\), one can rewrite this 2nd-order differential equation as a system of two 1st-order equations
which can be solved using standard first-order ODE methods.
For small angles \(\theta\) one can approximate \(\sin \theta \approx \theta\) and solved the equation $\( m L \frac{d^2 \theta}{dt^2} \approx - m g \theta. \)\( For a pendulum initially at angle \)\theta_0\(, the analytic solution for small angles reads \)\( \theta(t) \approx \theta_0 \cos\left( \sqrt{\frac{g}{L}} t + \phi\right), \)\( where \)\phi = 0$ if the pendulum is initially at rest.
g = 9.81
L = 0.1
def fpendulum(xin, t):
theta = xin[0]
omega = xin[1]
return np.array([omega,-g/L * np.sin(theta)])
theta0 = (20./180.) * np.pi
omega0 = 0.
x0 = np.array([theta0,omega0])
a = 0.
b = 2.0
N = 5000
h = (b-a)/N
sol = ode_rk4_multi(fpendulum, x0, a, h, N)
tpoints = sol[0]
xpoints = sol[1][:,0]
ypoints = sol[1][:,1]
def theta_small_angles(t):
return theta0 * np.cos(np.sqrt(g/L) * t)
xpoints_small = theta_small_angles(tpoints)
plt.title("Solving non-linear pendulum using RK4 method, ${\\theta_0 = " + str(theta0/np.pi) + "\pi}$")
plt.xlabel('t [s]')
plt.ylabel('${\\theta}$')
plt.plot(tpoints,xpoints,label='RK4')
plt.plot(tpoints,xpoints_small,label='${\\theta_0 cos(\sqrt{g/L}t)}$')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
g = 9.81
L = 0.1
def fpendulum(xin, t):
theta = xin[0]
omega = xin[1]
return np.array([omega,-g/L * np.sin(theta)])
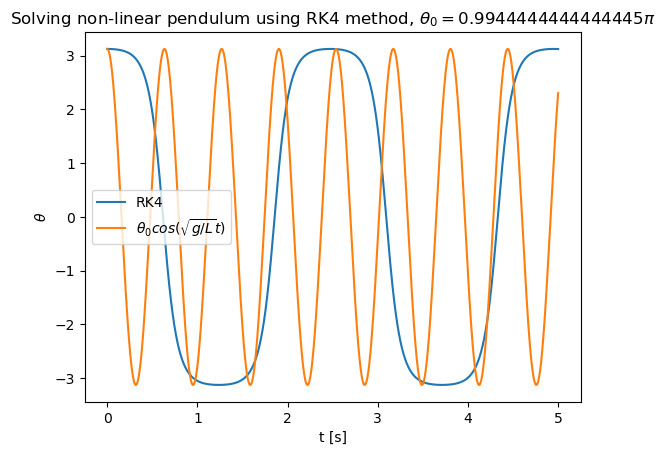
theta0 = (179./180.) * np.pi
omega0 = 0.
x0 = np.array([theta0,omega0])
a = 0.
b = 5.0
N = 5000
h = (b-a)/N
sol = ode_rk4_multi(fpendulum, x0, a, h, N)
tpoints = sol[0]
xpoints = sol[1][:,0]
ypoints = sol[1][:,1]
def theta_small_angles(t):
return theta0 * np.cos(np.sqrt(g/L) * t)
xpoints_small = theta_small_angles(tpoints)
plt.title("Solving non-linear pendulum using RK4 method, ${\\theta_0 = " + str(theta0/np.pi) + "\pi}$")
plt.xlabel('t [s]')
plt.ylabel('${\\theta}$')
plt.plot(tpoints,xpoints,label='RK4')
plt.plot(tpoints,xpoints_small,label='${\\theta_0 cos(\sqrt{g/L}t)}$')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
Adaptive time step for systems of ODEs#
The adaptive 4th-order Runge-Kutta method for single first-order ODE can be generalized to a system of ODEs. One has to generalize the notion of the difference \(|x_1 - x_2|\) between two estimates of the independent variable to the case of vectors \(\mathbf{x}_1\) and \(\mathbf{x}_2\) of variables.
The simplest choice would be to evaluate the modulus of the difference vector \(|\mathbf{x}_1 - \mathbf{x}_2|\), which would be the default choice. Alternatively, in some cases we may only be interested in the accuracy of a single variable from the vector, for example of coordinate \(x\) but not of velocity \(v\) in case of a second-order ODE cast as system of two first-order ODEs. In this case one can generalize the definition of the distance between \(\mathbf{x}_1\) and \(\mathbf{x}_2\) as appropriate for the problem at hand.
The implementation of the RK4 scheme with adaptive time step for a system of ODEs can be implemented as follows.
# The default definition of the error (distance) between two state vectors
# Default: the magnitude of the difference vector
def distance_definition_default(x1, x2):
diff = x1 - x2
diffnorm = np.sqrt(np.dot(diff, diff))
return diffnorm
def ode_rk4_adaptive_multi(f, x0, t0, h0, tmax, delta = 1.e-6, distance_definition = distance_definition_default):
"""Solve an ODE dx/dt = f(x,t) from t = t0 to t = t0 + h*steps
using 4th order Runge-Kutta method with adaptive time step.
Args:
f: the function that defines the ODE.
x0: the initial value of the dependent variable.
t0: the initial value of the time variable.
h0: the initial time step
tmax: the maximum time
delta: the desired accuracy per unit time
Returns:
t,x: the pair of arrays corresponding to the time and dependent variables
"""
ts = [t0]
xs = [x0]
h = h0
t = t0
i = 0
while (t < tmax):
if (t + h >= tmax):
ts.append(tmax)
h = tmax - t
xs.append(ode_rk4_step(f, xs[i], ts[i], h))
t = tmax
break
x1 = ode_rk4_step(f, xs[i], ts[i], h)
x1 = ode_rk4_step(f, x1, ts[i] + h, h)
x2 = ode_rk4_step(f, xs[i], ts[i], 2*h)
diffnorm = distance_definition(x1, x2)
if diffnorm == 0.: # To avoid the division by zero
rho = 2.**4
else:
rho = 30. * h * delta / diffnorm
if rho < 1.:
h *= rho**(1/4.)
else:
if (t + 2.*h) < tmax:
xs.append(x1)
ts.append(t + 2*h)
t += 2*h
else:
xs.append(ode_rk4_step(f, xs[i], ts[i], h))
ts.append(t + h)
t += h
i += 1
h = min(2.*h, h * rho**(1/4.))
return ts,xs
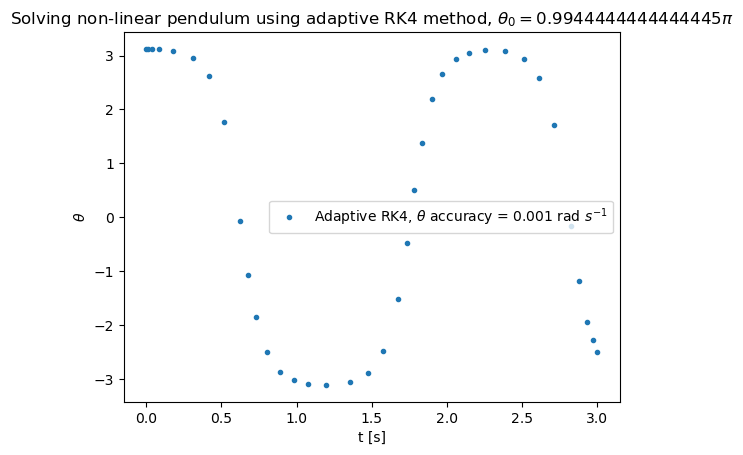
Let us apply the adaptive RK4 method to simulate the motion of a pendulum.
g = 9.81
L = 0.1
def fpendulum(xin, t):
theta = xin[0]
omega = xin[1]
return np.array([omega,-g/L * np.sin(theta)])
def error_definition_pendulum(x1, x2):
return np.abs(x1[0] - x2[0])
theta0 = (179./180.) * np.pi
omega0 = 0.
x0 = np.array([theta0,omega0])
a = 0.
b = 3.0
N = 500
h0 = (b-a)/N
eps = 1.e-3 # accuracy in theta
sol = ode_rk4_adaptive_multi(fpendulum, x0, a, h0, b, eps, error_definition_pendulum)
tpoints = [t for t in sol[0]]
xpoints = [x[0] for x in sol[1]]
ypoints = [x[1] for x in sol[1]]
plt.title("Solving non-linear pendulum using adaptive RK4 method, ${\\theta_0 = " + str(theta0/np.pi) + "\pi}$")
plt.xlabel('t [s]')
plt.ylabel('${\\theta}$')
plt.plot(tpoints,xpoints,'.',label='Adaptive RK4, ${\\theta}$ accuracy = ' + str(eps) + ' rad ${s^{-1}}$')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
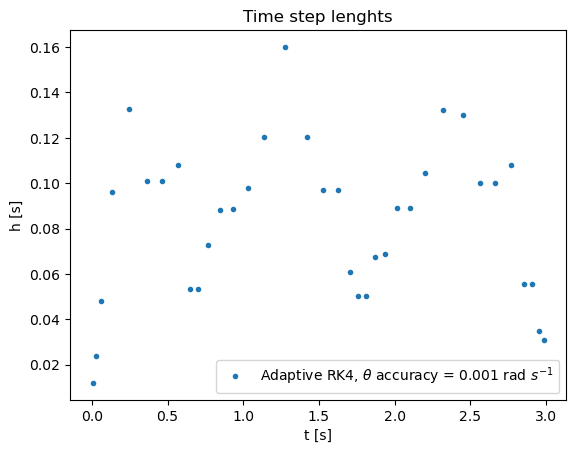
thpoints = []
hpoints = []
for i in range(len(tpoints) - 1):
thpoints.append(0.5*(tpoints[i] + tpoints[i+1]))
hpoints.append(tpoints[i+1] - tpoints[i])
plt.title("Time step lenghts")
plt.xlabel('t [s]')
plt.ylabel('h [s]')
plt.plot(thpoints,hpoints,'.',label='Adaptive RK4, ${\\theta}$ accuracy = ' + str(eps) + ' rad ${s^{-1}}$')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
Example: Comet motion#
This is Exercise 8.10 from M. Newman Computational Physics
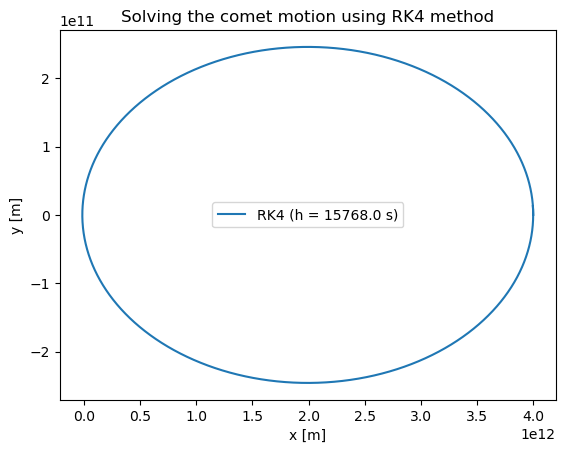
Many comets travel in highly elongated orbits around the Sun. For much of their lives they are far out in the solar system, moving very slowly, but on rare occasions their orbit brings them close to the Sun for a fly-by and for a brief period of time they move very fast indeed:

This is a classic example of a system for which an adaptive step size method is useful, because for the large periods of time when the comet is moving slowly we can use long time-steps, so that the program runs quickly, but short time-steps are crucial in the brief but fast-moving period close to the Sun.
The differential equation obeyed by a comet is straightforward to derive. The force between the Sun, with mass \(M\) at the origin, and a comet of mass \(m\) with position vector \(\vec{r}\) is \(GMm/r^2\) in direction \(-\vec{r}/r\) (i.e., the direction towards the Sun), and hence Newton’s second law tells us that
Canceling the mass \(m\) and taking the \(x\) component we have
and similarly for the other two coordinates. We can, however, throw out one of the coordinates because the comet stays in a single plane as it orbits. If we orient our axes so that this plane is perpendicular to the \(z\)-axis, we can forget about the \(z\) coordinate and we are left with just two second-order equations to solve:
where \(r=\sqrt{x^2+y^2}\).
We will write a program to the equations using the fourth-order
Runge–Kutta method with a fixed step size.
As an initial condition, we take a comet at coordinates \(x=4\) billion kilometers
and \(y=0\) (which is somewhere out around the orbit of Neptune) with
initial velocity \(v_x=0\) and \(v_y = 500\,\mathrm{m\,s}^{-1}\). The trajectory of the comet will be a plot of \(y\)
against \(x\).
G = 6.67430e-11 # m^3 / kg / s^2
Msun = 1.9885e30 # kg
def fcomet(xin, t):
x = xin[0]
y = xin[1]
vx = xin[2]
vy = xin[3]
r = np.sqrt(x*x+y*y)
return np.array([vx,vy,-G*Msun*x/r**3,-G*Msun*y/r**3])
x0 = [4.e12,0.,0.,500.]
a = 0.
b = 50. * 365. * 24. * 60. * 60. # 50 years
N = 100000 # 100 thousand RK4 steps
h = (b - a) / N # Time step: around 4 hours
sol = ode_rk4_multi(fcomet, x0, a, h, N)
tpoints_rk4_ref = sol[0]
xpoints_rk4_ref = sol[1][:,0]
ypoints_rk4_ref = sol[1][:,1]
vxpoints_rk4_ref = sol[1][:,2]
vypoints_rk4_ref = sol[1][:,3]
vpoints_rk4_ref = [np.sqrt(x[2]*x[2] + x[3]*x[3]) for x in sol[1]]
plt.title("Solving the comet motion using RK4 method")
plt.xlabel('x [m]')
plt.ylabel('y [m]')
plt.plot(xpoints_rk4_ref,ypoints_rk4_ref,label='RK4 (h = ' + str(h) + ' s)')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
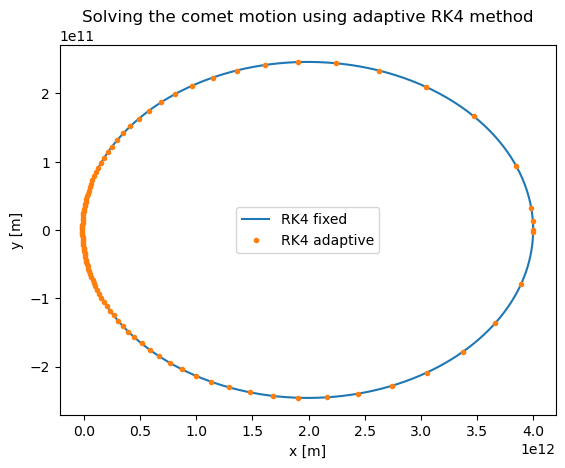
Let us now use the RK4 method with an adaptive time step. We expect to have a smaller step near the sun, where the comet motion is faster, and a larger step away from the sun
G = 6.67430e-11
Msun = 1.9885e30
def fcomet(xin, t):
x = xin[0]
y = xin[1]
vx = xin[2]
vy = xin[3]
r = np.sqrt(x*x+y*y)
return np.array([vx,vy,-G*Msun*x/r**3,-G*Msun*y/r**3])
def error_definition_comet(x1, x2):
return np.sqrt((x1[0]-x2[0])**2 + (x1[1]-x2[1])**2)
x0 = [4.e12,0.,0.,500.]
a = 0.
b = 50. * 365. * 24. * 60. * 60. # 50 years
h0 = 1. * 365. * 24. * 60. * 60. # Initial time step: 1 year
delta = 1000. * 1.e3 / (365. * 24. * 60. * 60.)
sol = ode_rk4_adaptive_multi(fcomet, x0, a, h0, b, delta, error_definition_comet)
tpoints = [t for t in sol[0]]
xpoints = [x[0] for x in sol[1]]
ypoints = [x[1] for x in sol[1]]
vxpoints = [x[2] for x in sol[1]]
vypoints = [x[3] for x in sol[1]]
vpoints = [np.sqrt(x[2]*x[2] + x[3]*x[3]) for x in sol[1]]
plt.title("Solving the comet motion using adaptive RK4 method")
plt.xlabel('x [m]')
plt.ylabel('y [m]')
plt.plot(xpoints_rk4_ref,ypoints_rk4_ref,label='RK4 fixed')
plt.plot(xpoints,ypoints,'.',label='RK4 adaptive')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
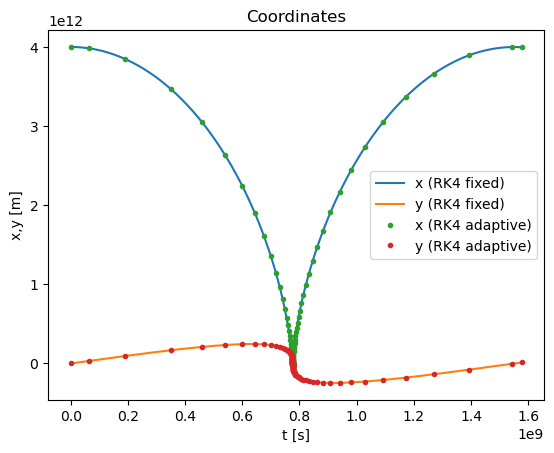
plt.title("Coordinates")
plt.xlabel('t [s]')
plt.ylabel('x,y [m]')
plt.plot(tpoints_rk4_ref,xpoints_rk4_ref,label='x (RK4 fixed)')
plt.plot(tpoints_rk4_ref,ypoints_rk4_ref,label='y (RK4 fixed)')
plt.plot(tpoints,xpoints,'.',label='x (RK4 adaptive)')
plt.plot(tpoints,ypoints,'.',label='y (RK4 adaptive)')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
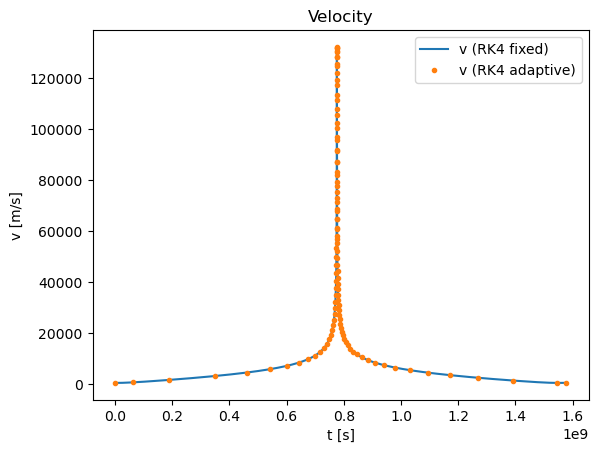
plt.title("Velocity")
plt.xlabel('t [s]')
plt.ylabel('v [m/s]')
plt.plot(tpoints_rk4_ref,vpoints_rk4_ref,label='v (RK4 fixed)')
plt.plot(tpoints,vpoints,'.',label='v (RK4 adaptive)')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()
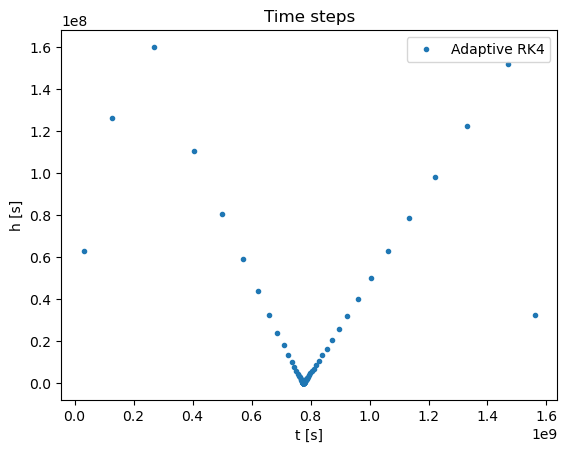
thpoints = []
hpoints = []
for i in range(len(tpoints) - 1):
thpoints.append(0.5*(tpoints[i] + tpoints[i+1]))
hpoints.append(tpoints[i+1] - tpoints[i])
plt.title("Time steps")
plt.xlabel('t [s]')
plt.ylabel('h [s]')
plt.plot(thpoints,hpoints,'.',label='Adaptive RK4')
#plt.plot(tpoints,ypoints,label='y')
plt.legend()
plt.show()